Correction des couleurs
L'objectif de la correction des couleurs est de modifier les valeurs de chaque canal chromatique sur l’ensemble des pixels d’une image de telle sorte que les valeurs mesurées après la transformation soient le plus proches possible de celles mesurée avant la numérisation. Plusieurs fonctions ont été testées pour rectifier l’altération des couleurs. L’ensemble des modèles construits pour restaurer la constance des couleurs ont été calibrés à partir des modalités chromatiques référencées d’une part dans une matrice après numérisation et, d’autre part, à partir des modalités chromatiques enregistrées dans une matrice avant la numérisation. L'article de D. Varghese en montre l'utilisation. Exemple d'aberation colorimetriques sur des chevres :

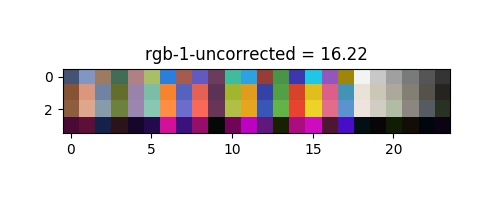
Chaque algorithme a été ajusté à l'aide d'un vérificateur de couleur "x-rite classique". Le vérificateur de couleurs est une grille imprimée de 24 carrés colorés, où chaque couleur est normalisée, référencée et optimisée pour la correction des couleurs. Nous avons pris une photo du vérificateur de couleurs avec un fond noir, et nous avons extrait la couleur en utilisant la vision par ordinateur. Pour chaque carré détecté nous calculons la couleur moyenne pour éliminer le bruit. Le modèle de correction des couleurs a été vérifié avec l'équation de la distance de couleur perçue deltla cie 2000 presenter plus bas, entre la matrice des couleurs rectifiées et celle des couleurs attendues.

Une couleur peut être représentée dans un espace chromatique par trois points, dont les coordonnées correspondent aux valeurs des trois couleurs primaires rouge, vert et bleu. Lors de la numérisation, l’instabilité de l'éclairage et la sensibilité des capteurs numériques modifient la position de ces points et entraîne un changement dans la perception des couleur. Biensur d'autres espace colorimetrique sont possibles.
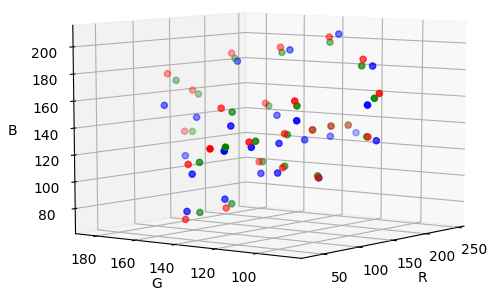 points : turquoise = destination ; jaune = perturbé ; rose = corriger
points : turquoise = destination ; jaune = perturbé ; rose = corriger
Et a partir de ces premiers informations nous pouvons tester differents modeles de corrections presente ci-dessous :
Transformation rigide
Nous essayons de faire correspondre une "transformation de corps rigide" 3D à des ensembles de points 3D (couleurs) donnés "depuis"
def rigid_transform(A, B): assert len(A) == len(B) N = A.shape[0]; centroid_A = np.mean(A, axis=0) centroid_B = np.mean(B, axis=0) AA = A - np.tile(centroid_A, (N, 1)) BB = B - np.tile(centroid_B, (N, 1)) H = np.transpose(AA) * BB U, S, Vt = np.linalg.svd(H) R = Vt.T * U.T # special reflection case if np.linalg.det(R) < 0: Vt[2,:] *= -1 R = Vt.T * U.T t = -R*centroid_A.T + centroid_B.T return R, t
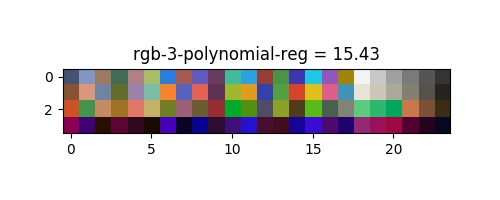
Régression polynomiale
La régression polynomiale consiste à améliorer la proximité de notre modèle par rapport aux données en augmentant l'ordre des relations entre les facteurs et les variables de réponse. Differents ordres de l'équation linéaire
def nd_order_colour_fit(target, detected, order=3): pr = np.poly1d(np.polyfit(detected[:,2], target[:,2], order)) pg = np.poly1d(np.polyfit(detected[:,1], target[:,1], order)) pb = np.poly1d(np.polyfit(detected[:,0], target[:,0], order)) return (pb, pg, pr)
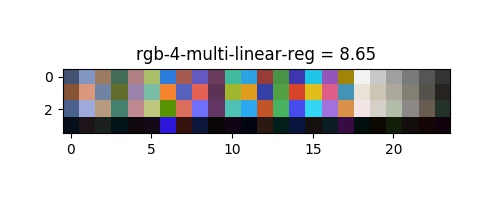
Regression lineaire multivariée
Nous nous intéressons à l'impact non seulement d'un, mais de nombreux facteurs différents sur la variable de réponse. Cette variable est généralement plus représentative des problèmes du monde réel que le modèle de stock à facteur unique par rapport à la réponse décrit ci-dessus (régression polynomiale). L'équation qui décrit régression linéaire multivariée pourrait s'écrire comme suit :
def first_order_colour_fit(m_1, m_2): system = np.linalg.lstsq(m_1.reshape(24,3), m_2.reshape(24,3)) foc = np.transpose(system[0]) foc = np.matrix(foc) return foc
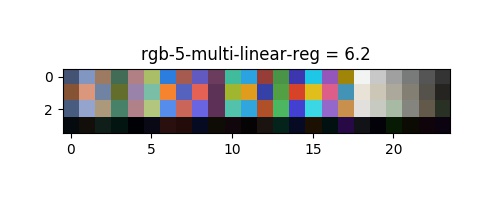
Regression polynomial multivariée
En outre, nous proposons d'utiliser la régression polynomiale. Elle calcule la relation entre une variable dépendante avec une ou plusieurs variables indépendantes (prédicteurs), et ces variables indépendantes. Par exemple, pour une variable indépendante, on pourrait estimer l'équation de régression :
np.polynomial.polynomial.polygrid3d np.polynomial.polynomial.polyval3d
Mesure des performances et choix de la méthode
La quantification des distances perceptuelle, ΔE 2000 , a été utilisée pour évaluer l’efficacité des transformations utilisées. Le calcul des ΔE 2000 sur les correctifs de la cible commerciale a permis de déterminer le modèle susceptible de fournir les meilleurs résultats lors de la validation. Le calcul des ΔE 2000 sur les carrés de la cible personnalisée a été utilisé pour la
Où
Resultats
Les distances perceptuelles ont ete extraites et montre une amélioration significative de la correction des couleurs, le bruit supplémentaire de
| space | raw | rigid | poly | multi-lin | multi-poly |
| hsv | 16.45 | 19.67 | 51.42 | 29.83 | 19.74 |
| lab | 16.55 | 17.37 | 21.48 | 13.36 | 6.97 |
| rgb | 16.55 | 13.98 | 14.83 | 8.94 | 6.4 |
| xyz | 16.62 | 14.62 | 15.48 | 9.22 | 6.44 |
| yuv | 16.53 | 8.75 | 21.83 | 7.83 | 6.45 |
Les colonnes "non corrigées" montrent une différence minuscule, et signifient une perte de précision lors de la conversion des couleurs. Le meilleur espace semble etre l'espace

La transformée rigide fournit le résultat attendu (intéressant seulement pour comparer d'autres algorithmes), il corrige surtout la balance des blancs, et une certaine rotation à l'intérieur de l'espace qui n'est pas suffisante pour modéliser la relation des transferts de couleurs. On peut voir un ajustement trop contraint pour la regression polynomial, à moins que le résultat soit bon sans bruit, le modèle montre le pire résultat. D'après l'article de G. D. Finlayson and M. Mackiewicz and A. Hurlbert les régression linéaire multiple montrent un bon résultat qui pourrait être suffisant. Notre proposition de régression polynomiale multivariée montre le meilleur résultat dans presque tout les espaces qui est presque parfait :
Pour conclure, il semblerais donc que l'espace